




| 模仿章鱼触手,机器人有“软硬功” 凌云 |
|
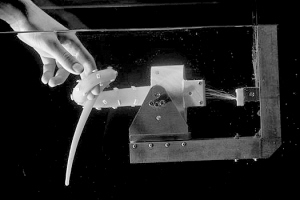
你一定听过这样的故事,研究者在机器人制造中模仿那些只在舌头或象鼻子中才有的特别的肌肉结构;另外,我们也介绍过像动物触手般的机械臂。但今天要说的这个机器人“章鱼触手”与众不同。它具有“软硬功”,既是柔软坚韧,足以环绕物件;但也可以变硬,以便将对象抓牢。它和其他机器人触手的另一种关键区别是,其他触须都设计成机器人的“臂”,比如拆弹机器人的机械臂,或者就只是个假肢夹子。而章鱼触手将设计成机器人章鱼实体的组成部分。 这个带有“软硬功”的触手是这样构成的,一根钢丝连接着一组尼龙牵线,所有这些都包裹在硅胶制成的皮肤里面。借助尼龙牵线操纵中央的钢丝,触手可以像蛇一样环绕对象,随即变得坚硬,将对象牢牢抓住。试制者并没有完全披露清楚触手如何调整它的软硬度。由于皮肤的硅胶外表面有足够的摩擦力,章鱼触手不需要像吸盘那样的抓取部件。 机器人“章鱼触手”项目由欧洲委员会EC资助,意大利比萨的圣安娜高等学校等高校执行,现在已经制作了一个43厘米长、能正常工作的样机,而它的原型则仿照栖息在地中海的真正章鱼。该项目计划在2013年结束,届时会向EC提供结构完整、运行良好、具备防水功能的机器人章鱼。 仿生机器人副教授拉斯基说,“我们要复制的不只是柔软,而是柔软加上有控制的刚度。”创建能工作的软机器人是个巨大的挑战,因为眼下大多数的工程都基于硬质材料,构建柔性结构的技术相对滞后。 机器人章鱼将可用于多种应用,如水下搜寻、救助和科学探索。可能有一天,一个巨大的机器人章鱼被派来挽救落水者的生命。 一些英国外科医生则在探索一种基于这项技术的内窥镜工具,柔软的工具能蜿蜒通过身体组织到达体内的指定位置,在那里再变成刚性,执行观察和手术任务。 凌云 |



|
