



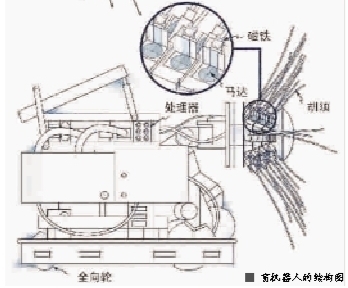
Shrewbot有小狗的大小,靠电池运行,装备着全向轮组,头部可以转动。它没有眼睛,唯一的感觉是触觉,靠的是安装在口鼻部的18根胡须。胡须用塑料制成,每秒来回扫动5次(相当于鼩鼱胡须速度的一半)。如果胡须触及到什么东西,它会向后弯曲,推动胡须根基处的磁铁。传感器检测到磁铁的位移,发送信号到Shrewbot的处理器。盲机器人就是借助这样的触觉功能识别周围物体的形状和纹理,创建所在环境的立体地图。
Shrewbot可以自主行动。一旦感受到一个物体,机器人那模仿鼩鼱的大脑立即启动探索过程,指挥胡须改变动作,在物件身上触摸,就像真鼩鼱那样。整个过程可以瞬间完成。Shrewbot可在30秒内完成一面约1米宽墙的检查。
研制团队由英国谢菲尔德大学布里斯托机器人实验室主任、神经科学家托尼·普雷斯科特领衔。他们在制作过程中显示了下列两方面的深厚功底:用机器人来探索大脑如何工作的思路,向生物学习开发新的机器人。
而说到盲机器人的用武之地,有一些场合是肯定的:在烟雾或尘埃弥漫、视力受阻的建筑物里搜救,或用于远程检查破坏程度。例如,城市下水道就很适合长胡须动物的活动,Shrewbot可以在这里发挥自己的特长检查管道裂缝。 凌启渝