


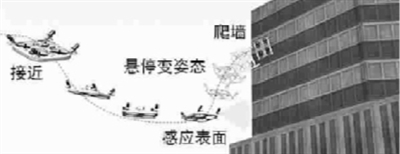
它飞行时的确就像四旋翼直升机,不过遇到前方有需要检查的物体(如建筑物的墙)时能会改变飞行姿态,垂直于地面飞行,贴近目标,栖息在结构的表面。它有自主导航系统,能借助传感器取信息,拼凑成所在环境的三维地图。即使是在建筑物内部,它也能对环境了如指掌。
大家知道,桥梁、高楼、风力发电机、大飞机等大型设施的结构完整性与安全密切相关。由于对大型结构老化带来崩溃危险的担忧,世界各地日益关注对其“健康”状况的监测。已有的移动机器人往往无法进入结构内部考察、检测,因为它们往往需要安装额外的基础设施,或借助磁技术或真空粘附性,这些技术都很难通用于表面形状不一、材料各异的结构。而CAROS攀登式无人机不需要额外的基础设施,具有最大的流动性和安全性。
由土木与环境工程教授孙明炫带领的团队首先分析无人机的机械结构,通过设计最大限度地提高飞行稳定性和壁上的抓地力。他们开发了两套算法,分别针对飞行/攀登模式转换和爬壁控制。团队巧用正向和反向动力学,使无人机能持续贴近目标表面完成慎密的结构检查和维护。更特别的是,一旦CAROS受到干扰而掉落跌下,它立马发挥其无人机的“本能”,迅速接管对自身的控制,自主飞回工作地点,或返回安全处。
KAIST表示,该无人机可用于火灾或其他灾害的监控、评估,它在灾难现场能穿越狭窄紊乱的室内环境;能视情况或飞行或爬壁,灵活切换。配备热成像仪后能通过热成像在现场寻找并跟踪人员。它能通过无线通信传输关于环境的信息。它也有望用于高层建筑、风力涡轮机叶片、太阳能电池板等的检查和清洁保养;在偏远地区更能大显身手。
但如若要去火场,最好请出FAROS(防火空中机器人系统),这是基于CAROS开发的“表兄弟”,更能进入火灾现场。覆盖着芳纶纤维的机身保护电子和机械部件免受火焰的直接破坏;护甲下的空气缓冲层和基于Peltier元件的冷却系统帮助将温度保持在特定范围内。FAROS利用二维激光扫描仪和机载惯性测量单元(IMU)传感器了解自己的姿态,实现自主导航。而借助定位结果和机载的热成像摄像机,机器人能以专门的图像处理技术检测火点,并定位报告。
孙教授说,“摩天大楼和超大结构让城市拥挤不堪,高层建筑火灾严重危及生命。FAROS可在早期阶段部署到灾难地区,最大限度地提高安全性和救援任务的效率,帮助将损害降到最低。”
由于其新颖性和潜力,CAROS和FAROS得到了国际媒体的关注,团队也已为之申请了相关专利。 稼正(图KAIST)