

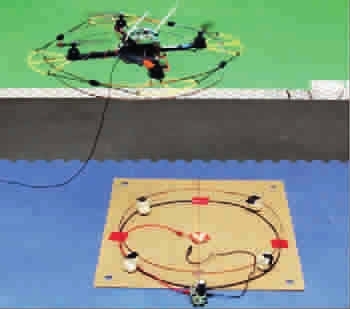
美国内布拉斯加-林肯大学NIMBUS实验室的机器人专家研究了一个充满“未来色彩”的解决方案:召来一架四旋翼无人机,借助无线感应来充电。
充电旋翼机的工作原理一目了然:需要两个线圈,一个安装在旋翼机上,另一个则连接在需要充电的设备上。旋翼机上的线圈通电流,形成一个振荡磁场。这时,旋翼机发挥自己的特长,悬停到足以引起接收器线圈谐振的范围内,形成充电对象能利用的电压。
在实验中,旋翼机与充电对象保持得足够接近,以35%的效率发送5.5瓦的功率,这足以点亮灯泡,为一些设备充电不在话下。
不过,工程师们挂念的不只是灯泡或手机,他们设想的故事多多,如水下机器人返回基地发送数据时,旋翼机为它进行水中充电;而安装在野外的传感器在缺失太阳能或电网供电时,可以如此得到电力支援。
稼正