



最近,开发过Octobot软机器人的哈佛团队又创造了一种可移动的半软机器人,灵感来自蜘蛛和昆虫,而用的竟是喝果汁的吸管和一些充气囊。
研究的首席研究员乔治·怀特塞兹说,“我们身边有很多精灵,比如蜘蛛和昆虫,移动异常灵活,能快速爬上各种各样东西。它们在重量和形状方面的优势,超越硬质的大型机器人。那么,我们怎样创建这样的东西呢?”
团队首先在普通的塑料吸管上切些细缝,使其能够弯曲。他们将吸管穿插组合,两边粘上橡皮带起到腱的作用。当管道膨大时,“关节”处向外延伸;关节收缩时,橡皮腱让吸管复位。
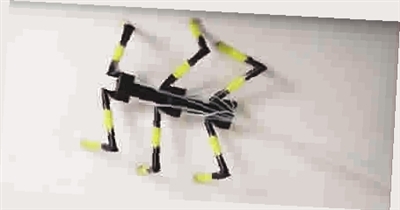
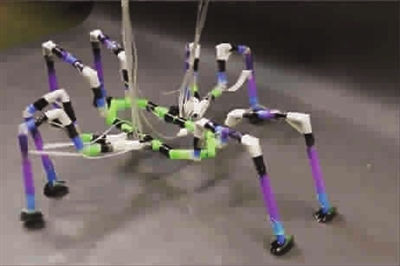
团队采取了从简到繁的做法,逐渐建立腿越来越多的机器人。首先是单管,就只是一根吸管,借助充气囊能向前推进。在另一端加上第二条腿,机器人能通过推拉来移动(图一)。装上第三条腿,它能像三脚架一样站立。6条腿时机器人在Arduino单片机引导下能像蚂蚁那样走路(图二)。当机器人有8条腿时(图三),团队知道现在的挑战在于走路方式的编程。他们研究蚂蚁和蜘蛛的运动方式,来安排机器人腿的运动,让软机器人充分借鉴这些动物的运动方式。另外,由于材料的重量轻,吸管机器人甚至能漂浮在水面上自行移动。
吸管机器人还没有投入现实应用,其控制技术也显得简单,但怀特塞兹认为其意义在于思维上的创新,用日常的现成材料,从生物身上得到启发,进行技术重塑,这对于未来的创新方向具有指导意义。
“蜘蛛有能力随时调节腿伸展的速度,让关节适时、精确地配合肢体的前后运动。”参加研究的亚历克斯·内米诺斯基说,“我们的研究中,由于阀门系统很简单,关节的运动只有两种状态。一是打开压力源阀门,给关节充气,让腿伸展;二是切换到放气阀门打开,关节放气收缩,腿被收回。当做到8条腿时,我们必须为其开发兼容于关节运动的独特步态。让我们简单的机器人精确地复制蜘蛛移动的机制实在是很难。”
“简单,是其真正吸引人的地方,”内米诺斯基说。“它们在构造和控制方面都很简单,却演示了如此复杂的运动和完整的结构。我们以容易找到的单一材料,采用单一的执行器概念,实现了复杂的多维运动。”
吸管制成机器人,听起来像手工艺品,但一旦原型证明了设计概念,未来的模型可以采用轻质聚合物来制作。这些带关节的机器人可能最终——与一群机器蟑螂一起——用于灾区搜索和救援任务。
研究发表在《软机器人》杂志上。
凌启渝