


这种自治的人工智能机器人是英国布里斯托大学一个学术团队设计和开发的。最初的目标是创建一种微型“吃垃圾机”,能像野生动物那样觅食,自己驱动自己,不需要人类的不断补给。具体的灵感,则来自你我都可能见到过的水虫——划蝽。
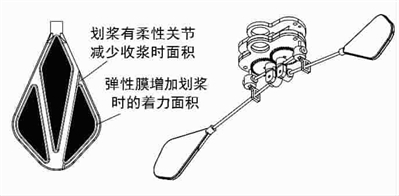
为了浮在水面,划桨机器人有4个小小的稳定器。身体中间有两支桨,推动机器移动。划桨装有柔性的鳍状肢关节,收桨时减小正面积,减少阻力;而带弹性的膜则增加划桨时的着力面积,确保移动效率。
驱动划桨机器人是一种微生物燃料电池MFC。电池内充满细菌,消化、分解有机废物,释放出电子和质子,电子借助一系列有效传递在阴极形成电流,驱动电子器件。
划桨机器人有个嘴巴,将水摄入燃料电池。机器人的一个动作周期是这样的:它开启嘴,向前游,划桨10下,频率是每秒不到1次,然后闭上嘴巴。消化3分钟后,水从后面的出水口排出,机器人再次前进并吞食。MFC产生的能量存储在一个电容器里。
划桨机器人的效率非常高,上述的一个动作周期,它仅仅耗用1.8焦耳的能量。论文介绍,划桨机器人产生的能量多于它维持本身活动所需要补充的。据计算,它运动20厘米的距离,能多出约1焦耳的能量。这是很了不起的,且不说多余的电力能干啥,至少意味着机器人可以能量自给,不需要我们为它操心。设想在未来,对付废水可能很简单,将一批划桨机器人灌入被污染的水域,然后静待它们吃尽所有的垃圾。 比尔