


由日本东京大学研制的郎机器人全身共有肌肉160块,其中76块在躯干上,12块在肩膀上,22块在脖子上,而腿肉则有50块。它脚蹬一双看上去有点不合脚的网球鞋。而158厘米的身高、50公斤的体重,都与一位12岁日本男孩相当。它所有的骨骼和肌肉都仿照真人配备;四肢在整个体重中所占的比例也与真人体的比例相吻合。所以说,郎是从生物学角度看也十分准确的仿生机器人。
那么,为什么要尝试和模仿人类的身体呢?项目负责人中西裕翔说,要将仿生机器人提高到新水平,重量是个棘手问题。他谈到郎的前身——小次郎,那是用肌腱驱动的机器人,只有上半身,却已有45公斤重量。按此比例的话,全身型的郎机器人重量会达到100公斤!这对较小型机器人来说是太重了。
于是项目组决定更彻底地向真人学习,用与人相当的重量比来设计机器人的肌肉和骨架。从2010年开始,他们给小次郎机器人增添更多的肌肉和电机,使新机器人郎的基础成为迄今最接近真人的结构。比如说,55公斤的男孩大腿上有约5公斤肌肉,小腿上2.5公斤。而郎最后采用的比例是大腿肌肉4公斤、小腿2.76公斤,与其相似。
除了重量,研究人员也试图达成真人肌肉的力矩和关节活动的速度。郎的总输出功率是小次郎的5倍以上,它能像体操运动员那样潇洒地抬腿。郎的关节扭矩与人几乎等量;但关节角速度不如真人,大约是70-100度/秒。这是兼顾重量和功率的结果,如果采用更强更大的电机,往往就会比较重。
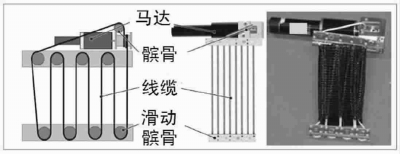
与小次郎一样,郎也是由滑轮状肌肉系统(如图)驱动的,不过这次采用的不是先前的点至点肌肉,而是扁而宽的平面状肌肉。肌肉由单一电机启动,提高了稳定性。这些电机赋予郎机器人64个自由度(双手除外):其中脖子和双臂各13个,两条腿各7个,而脊柱11个自由度。
郎的铝制骨骼结构看上去相当有型,肋骨架特别令人印象深刻,比先前用三维打印作的骨架(往往会破损)更加坚固;而郎的膝盖关节还包括仿真的十字韧带和能滑动的髌骨。 凌启渝