


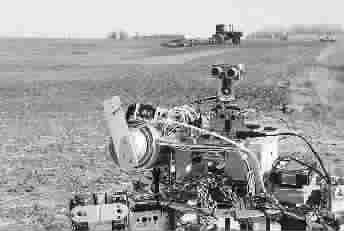
道浩特的主业是昆虫学家,但在业余时间他沉浸于自己的业余爱好,变身机器人发烧友。眼下他正在研制革命性的农业机器人Prospero。他有一小队六足机器人,采用群技术和运行博弈软件,它们能携手合作,优化指定地块的种植。
Prospero下到农田,首先会根据农时、种子和土壤类型的不同,先判断怎样种植能让这块土地获得最大收益,然后它们精准地耕种,寸土必究。它们会检查在预想的位置是否已经有种子播下。如果没有,就会把种子放置到理想的深度,然后作好标记。
标记的方法是从蚂蚁那里学来的。蚂蚁利用信息素留下标志,使其他蚂蚁可以找到该关注地点。机器人农民会在播下种子后喷洒白色颜料,它改变了周围土壤的反射率。其他机器人获知这种变化,就“看”到地块里的每一颗种子了。
Prospero是集群下地干活的,机器人通过红外线彼此沟通,如此组成了一个执行博弈论运算的系统。机器人农民们记住每颗种子的种植地点,在需要协作时相互给信号,优化播种间距。
Prospero的操作十分简单,不需要GPS那样的数据密集型系统,主要通过一路走时简单的“交谈”实现互相沟通。
道浩特说,机器人农民刚刚起步,当前的Prospero样机只算得上是自动化的微型播种机,下一阶段将逐步增加机器化管理、机器化收获等功能。他想要的机器人农民最终将可以种植、管理并收获作物,全程自主地——更重要的是以最有效的方式——包揽所有的农活。机器人农民可以全天候工作,帮助一块地保持在最佳条件,不用化学品对抗害虫及其他外来入侵植物,提高作物产量和作物健康。不过很明显,要达成这样的目标尚需时日。 凌启渝